
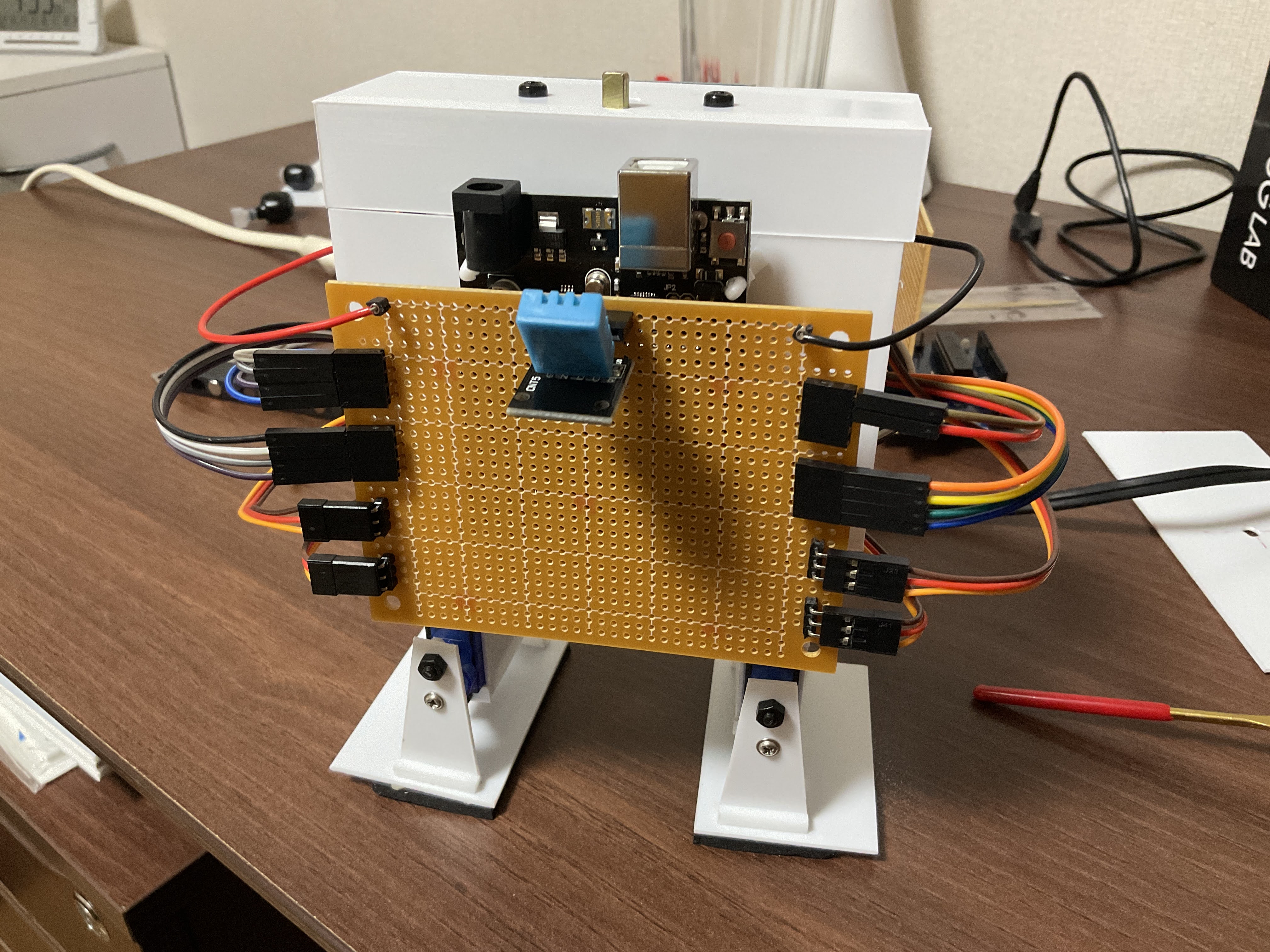
大学1年生の授業の自由課題で製作した二足歩行ロボット
説明資料
課題発表時に使用した資料
メカラボットを製作しようとしたきっかけ
大学側から与えられたArduinoの電子工作キットの部品のみを使用し『役に立つものを作れ』という課題が提示されました.そこで,誰に役に立つモノを作るかと考え,まずは自分にとって役に立つ,つまり自分が製作していて感情がプラスになるテーマを考え,ずっと作りたいと感じていた二足歩行ロボットを製作することとしました.
二足歩行ロボットをテーマにした理由としては,授業等で,世界で初めて二足歩行ロボットを製作したのは早稲田大学であること,長年の進化を経て,より人間に近づいた歩行ができるようになったことなどを知り,自分も少しその分野に触れてみたいと思ったからです.
脚部ついて
Arduinoに搭載されたサーボモータ用のピンは六つしかなく,二つは腕に搭載するとしたため,四つのサーボモータのみで足を動作させなければなりませんでした.また,ジャイロセンサが支給されず,足を浮かせた歩行を行うことができなかっため, 四つのサーボを順番に動かし,すり足で歩行することにしました.すり足で歩行する際に足裏の摩擦力を増やすために,ゴム素材を足裏に貼り付けました.
頭部について
複数のパターンをキットの中にあった7セグに表示することでロボットの目を作りました.また,LEDを複数個並べて表情ごとに光らせ方を変えることで顔全体で喜怒哀楽を色と形で表現しました. さらに,コロナ禍で役に立つための機能として,高校生時代に部活で使用していたチューブポンプを用いて,アルコール消毒が行える機能も搭載しました.
コーディングについて
リモコン・頭部・腹部合わせて3つのArduinoを使いプログラミングを行いました.それぞれのArduinoはシリアル通信にて繋がっており,特にリモコンと頭部の通信では,シリアル通信を赤外線に載せて通信をする手法を海外のサイトから採用しました. 歩行8パターンに加え,表情の変化や日常で使える機能など多数の機能を詰め込んだため,長文のコードとなってしまい,コードの可読性の大切さを痛感しました.